海底掃除ロボ来春実用化へ、魚に影響与える電力は使わず、すべて水力で稼働
海底掃除ロボットが登場した。大阪市の産学協同チームが開発しているロボット「ロボフィッシャー」だ。水族館の巨大水槽の清掃を目的とする自律走行型ロボットで、エネルギー源として電力ではなく水力を利用。生きている魚に影響を与えないよう最大限の配慮が払われている。この11月30日に大阪市内のプールで走行テストを完了、来春にも水族館で実稼働を開始する。
大阪市港区にある世界最大級の水族館「大阪海遊館」。その「目玉」が中心に位置する「太平洋水槽」だ。深さ9m、最大長34m、水量5,400トンの巨大なスケールで太平洋の雄大な光景を再現。人気の高いジンベエザメをはじめ、エイ、マグロ、ブリなどの大型回遊魚が悠然と泳ぐ姿を見ることができる。
大阪市工業会連合会の異業種交流会に属する8企業と大阪市立大学で結成したコンソーシアムが開発している海底掃除ロボット「ロボフィッシャー」は、この巨大な「太平洋水槽」の底に敷き詰めた砂利の表面に堆積する汚物を清掃するために開発された。
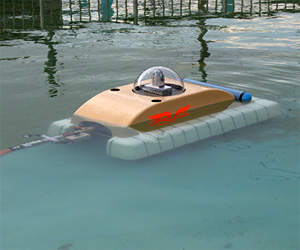
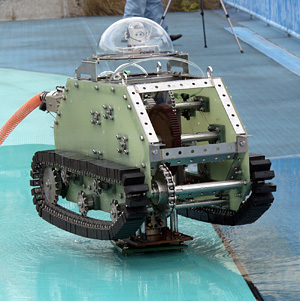
水中で清掃作業を行う「ロボフィッシャー」
現在、清掃はダイバー2人によって1日4回行われており、太平洋水槽をはじめとする水槽の清掃費用は年間約3千万円にものぼっている。海遊館ではまず太平洋水槽の清掃をロボットにより自動化。さらに、魚の目から見た映像としてロボットに装着した水中カメラの映像を映し出して来場者に楽しんでもらおう、という計画だ。
 海底掃除ロボットを開発するにあたっての最大の条件は「魚の生態に影響を与えないこと」(ロボフィッシャー開発チームリーダー・福地守・福地金属社長)。そのため電力は使用できない。電力を使うと磁場が生じ、それが魚に与える影響が不明だというのが理由だ。また、またさまざまな駆動装置をなめらかに動かすための油性の潤滑材についても、漏れ出る可能性があるため使用が禁じられている。その上、ロボットの形状や動きでは、「仮に接触しても決して魚を傷めない」という条件もつけられた。
海底掃除ロボットを開発するにあたっての最大の条件は「魚の生態に影響を与えないこと」(ロボフィッシャー開発チームリーダー・福地守・福地金属社長)。そのため電力は使用できない。電力を使うと磁場が生じ、それが魚に与える影響が不明だというのが理由だ。また、またさまざまな駆動装置をなめらかに動かすための油性の潤滑材についても、漏れ出る可能性があるため使用が禁じられている。その上、ロボットの形状や動きでは、「仮に接触しても決して魚を傷めない」という条件もつけられた。
そこで「ロボフィッシャー」は、エネルギー源として水力を採用。水槽外に設置したポンプから高圧の水を送り出し、その力を利用することにした。ホースでロボットに送り込まれた水が、ロボットに内蔵した水力モーターを回転させてエネルギー源となる。本体の走行エネルギーや、さまざまな制御もすべてこの水力エネルギーでまかなう。本体は突起物をなくして魚を傷つけないデザインにした。魚を守るばかりでなく、作業中のロボットに馴れてきた魚が噛み付くなどのイタズラからロボット自身を守る、という目的もある。
「ロボフィッシャー」は、あらかじめ設定した直進距離をキャタピラで進むと、本体を持ち上げて旋回し、再び本体を沈めたのち前進するという動作を繰り返す。本体内のノズルから勢い良く噴出する水流で水底の砂を巻き上げ、フィルターで分離した食べかすなどの不純物を専用のホースで吸い上げることで砂底を清掃するしくみだ。今後は「海水仕様、水深への対応、砂上での安定駆動」(福地守リーダー)など実用に向けた最終課題をクリアした後、来年3月をめどに実用機の完成を目指す。(倉増 裕)
本体を持ち上げて旋回、方向転換する
大阪市港区にある世界最大級の水族館「大阪海遊館」。その「目玉」が中心に位置する「太平洋水槽」だ。深さ9m、最大長34m、水量5,400トンの巨大なスケールで太平洋の雄大な光景を再現。人気の高いジンベエザメをはじめ、エイ、マグロ、ブリなどの大型回遊魚が悠然と泳ぐ姿を見ることができる。
大阪市工業会連合会の異業種交流会に属する8企業と大阪市立大学で結成したコンソーシアムが開発している海底掃除ロボット「ロボフィッシャー」は、この巨大な「太平洋水槽」の底に敷き詰めた砂利の表面に堆積する汚物を清掃するために開発された。
水中で清掃作業を行う「ロボフィッシャー」
現在、清掃はダイバー2人によって1日4回行われており、太平洋水槽をはじめとする水槽の清掃費用は年間約3千万円にものぼっている。海遊館ではまず太平洋水槽の清掃をロボットにより自動化。さらに、魚の目から見た映像としてロボットに装着した水中カメラの映像を映し出して来場者に楽しんでもらおう、という計画だ。
海底掃除ロボットを開発するにあたっての最大の条件は「魚の生態に影響を与えないこと」(ロボフィッシャー開発チームリーダー・福地守・福地金属社長)。そのため電力は使用できない。電力を使うと磁場が生じ、それが魚に与える影響が不明だというのが理由だ。また、またさまざまな駆動装置をなめらかに動かすための油性の潤滑材についても、漏れ出る可能性があるため使用が禁じられている。その上、ロボットの形状や動きでは、「仮に接触しても決して魚を傷めない」という条件もつけられた。そこで「ロボフィッシャー」は、エネルギー源として水力を採用。水槽外に設置したポンプから高圧の水を送り出し、その力を利用することにした。ホースでロボットに送り込まれた水が、ロボットに内蔵した水力モーターを回転させてエネルギー源となる。本体の走行エネルギーや、さまざまな制御もすべてこの水力エネルギーでまかなう。本体は突起物をなくして魚を傷つけないデザインにした。魚を守るばかりでなく、作業中のロボットに馴れてきた魚が噛み付くなどのイタズラからロボット自身を守る、という目的もある。
「ロボフィッシャー」は、あらかじめ設定した直進距離をキャタピラで進むと、本体を持ち上げて旋回し、再び本体を沈めたのち前進するという動作を繰り返す。本体内のノズルから勢い良く噴出する水流で水底の砂を巻き上げ、フィルターで分離した食べかすなどの不純物を専用のホースで吸い上げることで砂底を清掃するしくみだ。今後は「海水仕様、水深への対応、砂上での安定駆動」(福地守リーダー)など実用に向けた最終課題をクリアした後、来年3月をめどに実用機の完成を目指す。(倉増 裕)
本体を持ち上げて旋回、方向転換する